Join War on the Rocks and gain access to content trusted by policymakers, military leaders, and strategic thinkers worldwide.

Editor’s note: This is the fifth article in a six-part series, The Coming Swarm, on military robotics and automation as a part of the joint War on the Rocks-Center for a New American Security Beyond Offset Initiative. Read the first, second, third, and fourth entries in this series.
Today’s uninhabited vehicles are largely tele-operated, with a person piloting or driving the vehicle remotely, but tomorrow’s won’t be. They will incorporate increasing autonomy, with human command at the mission level. This will enable one person to control multiple vehicles simultaneously, bringing greater combat power to the fight with the same number of personnel. Scaling up to large swarms, however, will require even more fundamental shifts in the command and control paradigm.
The Naval Postgraduate School is working on a 50-on-50 swarm vs. swarm aerial dogfight, and researchers at Harvard have built a swarm of over a thousand simple robots working together to create simple formations. As the number of elements in a swarm increases, human control must shift increasingly to the swarm as a whole, rather than micromanaging individual elements.
How to exercise effective command and control over a swarm is an area of nascent and important research. How does one control a swarm? What commands can be issued to a swarm? How does one balance competing aims, such as optimality, predictability, speed, and robustness to disruption?
Possible swarm command and control models, ordered from more centralized to increasingly decentralized control, include:
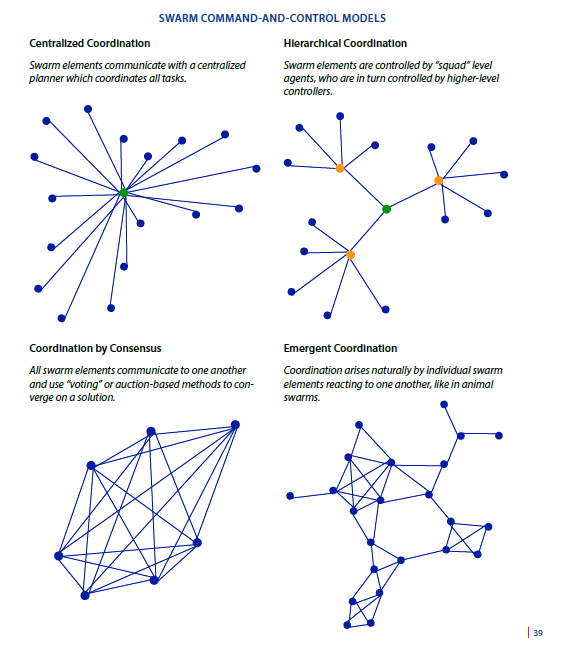
Swarm Command and Control Models (click to enlarge)
Each of these models has different advantages, and may be preferred depending on the situation. While completely decentralized swarms are able to find optimal solutions to complex problems, like how ant colonies converge on the shortest route for carrying food back to the base, converging on the optimal solution may take multiple iterations, and therefore time. Centralized or hierarchical planning may allow swarms to converge on optimal, or at least “good enough,” solutions more quickly, but requires higher bandwidth to transmit data to a central source that then sends instructions back out to the swarm. Action by consensus, through voting or auction mechanisms, could be used when low bandwidth communications exist between swarm elements. When no direct communication is possible, swarm elements could still rely on indirect communication to arrive at emergent coordination, however. This could occur by co-observation, like how animals flock or herd, or stigmergic communication by altering the environment, similar to how termites build complex structures. Indeed, this term – stigmergy – was coined in 1950’s by a French zoologist researching termites.
Decentralized swarms are inherently robust and adaptive
Centralized control is not always optimal even if high-bandwidth communications exist, since detailed plans and overly specific direction can prove brittle in a fast-changing battlefield environment. Decentralized control – either through localized “squad commanders,” voting-based consensus mechanisms, or emergent coordination – has the advantage of pushing decision-making closer to the battlefield’s edge. This can both accelerate the speed of immediate reaction and make a swarm more resilient to communications disruptions. Swarms of individual elements reacting to their surroundings in accordance with higher-level commander’s intent represent the ultimate in decentralized execution. With no central controller to rely upon, the swarm cannot be crippled or hijacked in toto, although elements of it could be. What a decentralized swarm might sacrifice in terms of optimality, it could buy back in faster speed of reaction. And swarms that communicate indirectly through stigmergy or co-observation, like flocks or herds, are immune to direct communication jamming.
Hordes of simple, autonomous agents operating cooperatively under a centralized commander’s intent but decentralized execution can be devilishly hard to defeat. The scattered airdrop of paratroopers over Normandy during the D-Day invasion wrecked detailed Allied plans, but had the unintended effect of making it nearly impossible for Germans to counter the “little groups of paratroopers” dispersed around, behind, and inside their formations. Simple guidance like “run to the sounds of gunfire and shoot anyone not dressed like you” can be effective methods of conveying commander’s intent, while leaving the door open to adaptive solutions based on situations on the ground. The downside to an entirely decentralized swarm is that it could be more difficult to control, since specific actions would not necessarily be predictable in advance.
Command and control models must balance competing objectives
Choices about command and control models for swarms may therefore depend upon the balance of competing desired attributes, such as speed of reaction, optimality, predictability, robustness to disruption, and communications vulnerability. The optimal command and control model for any given situation will depend on a variety of factors, including:
The best swarm would be able to adapt its command and control paradigm to changing circumstances on the ground, such as using bandwidth when it is available but adapting to decentralized decision-making when it is not. In addition, the command and control model could change during different phases of an operation, and different models could be used for certain types of decisions.
Human control can take many forms
Human control over a swarm can take many forms. Human commanders might develop a detailed plan and then put a swarm into action, allowing it to adapt to changing circumstances on the ground. Alternatively, human commanders might establish only higher-level tasks, such as “find enemy targets,” and allow the swarm to determine the optimal solution through centralized or decentralized coordination. Or human controllers might simply change swarm goals or agent preferences to induce certain behaviors. If the cognitive load of controlling a swarm exceeds that of one person, human tasks could be split up by breaking a swarm into smaller elements or by dividing tasks based on function. For example, one human controller could monitor the health of vehicles, with another setting high-level goals, and yet another approving specific high-risk actions, like use of force.
Ultimately, a mix of control mechanisms may be desirable, with different models used for different tasks or situations. For example, researchers exploring the use of intelligent agents for real-time strategy games developed a hierarchical model of multiple centralized control agents. Squad-based agents controlled tactics and coordination between individual elements. Operational-level agents controlled the maneuver and tasking of multiple squads. And strategy-level agents controlled overarching game planning, such as when to attack. In principle, cooperation at each of these levels could be performed via different models in terms of centralized vs. decentralized decision-making or human vs. machine control. For example, tactical coordination could be performed through emergent coordination, centralized agents could perform operational-level coordination, and human controllers could make higher-level strategic decisions.
In order to optimize their use of swarms, human controllers will need training to understand the behavior and limits of swarm automation in real-world environments, particularly if the swarm exhibits emergent behaviors. Human controllers will need to know when to intervene to correct autonomous systems, and when such intervention will introduce suboptimal outcomes.
Basic research on robotic swarms is underway in academia, government, and industry. In addition to better understanding swarming behavior itself, more research is needed on human-machine integration with swarms. How does one convey to human operators the state of a swarm simply and without cognitive overload? What information is critical for human operators and what is irrelevant? What are the controls or orders humans might give to a swarm? For example, a human controller might direct a swarm to disperse, coalesce, encircle, attack, evade, etc. Or a human might control a swarm simply by using simulated “pheromones” on the battlefield, for example by making targets attractive and threats repellent. To harness the power of swarms, militaries will not only need to experiment and develop new technology, but also ultimately modify training, doctrine, and organizational structures to adapt to a new technological paradigm.
Paul Scharre is a fellow and Director of the 20YY Warfare Initiative at the Center for a New American Security (CNAS) and author of CNAS’ recent report, “Robotics on the Battlefield Part II: The Coming Swarm.” He is a former infantryman in the 75th Ranger Regiment and has served multiple tours in Iraq and Afghanistan.
Photo credit: Mehmet Karatay
{kind=link}