Join War on the Rocks and gain access to content trusted by policymakers, military leaders, and strategic thinkers worldwide.

Editor’s note: This is the third article in a six-part series, The Coming Swarm, on military robotics and automation as a part of the joint War on the Rocks-Center for a New American Security Beyond Offset Initiative. Read the first and second entries in this series.
Could swarms of low-cost expendable systems change how militaries fight? Last November, Under Secretary of Defense Frank Kendall asked the Defense Science Board to examine a radical idea: “the use of large numbers of simple, low cost (i.e. ‘disposable’) objects vs. small numbers of complex (multi-functional) objects.” This concept is starkly at odds with decades-long trends in defense acquisitions toward smaller numbers of ever-more expensive, exquisite assets. As costs have risen, the number of fighting platforms in the U.S. inventory has steadily declined, even in spite of budget growth. For example, from 2001 to 2008, the U.S. Navy and Air Force base (non-war) budgets grew by 22% and 27% percent, respectively, adjusted for inflation. Yet the number of ships in the U.S. military inventory decreased by 10% and the number of aircraft by 20%. The result is ever-diminishing numbers of assets, placing even more demands on the few platforms remaining, a vicious spiral that rises costs even further and pushes numbers even lower. Over thirty years ago, Norm Augustine warned that:
In the year 2054, the entire defense budget will purchase just one tactical aircraft. This aircraft will have to be shared by the Air Force and Navy 3½ days each per week except for leap year, when it will be made available to the Marines for the extra day.
But we need not wait until 2054 when the U.S. military only has one combat aircraft for “Augustine’s Law” to be a problem. It is here today.
Kendall is joined by a growing number of voices calling for a paradigm shift: from the few and exquisite to the numerous and cheap. T.X. Hammes wrote for WOTR in July of last year that the future of warfare was the “small, many, and smart” over the few and exquisite. And none other than the current Deputy Secretary of Defense Bob Work wrote back in January of 2014:
Moreover, miniaturization of robotic systems would enable the rapid deployment of massive numbers of platforms – saturating an adversary’s defenses and enabling the use of swarming concepts of operation that have powerful potential to upend more linear approaches to war-fighting.
Overwhelming an adversary through mass has major advantages, but a deluge is not a swarm. The power of swarming goes beyond overwhelming an adversary through sheer numbers. In nature, swarming behavior allows even relatively unintelligent animals like ants and bees to exhibit complex collective behavior, or “swarm intelligence.” Similarly, autonomous cooperative behavior among distributed robotic systems will enable not only greater mass on the battlefield, but also greater coordination, intelligence, and speed.
What is a swarm?
A swarm consists of disparate elements that coordinate and adapt their movements in order to give rise to an emergent, coherent whole. A wolf pack is something quite different from a group of wolves. Ant colonies can build structures and wage wars, but a large number of uncoordinated ants can accomplish neither. Harnessing the full potential of the robotics revolution will require building robotic systems that are able to coordinate their behaviors, both with each other and with human controllers, in order to give rise to coordinated fire and maneuver on the battlefield.
Swarming in nature can lead to complex phenomena
Swarms in nature are wholly emergent entities that arise from simple rules. Bees, ants, and termites are not individually intelligent, yet their colonies can exhibit extraordinarily complex behavior. Collectively, they are able to efficiently and effectively search for food and determine the optimal routes for bringing it back to their nests. Bees can “vote” on new nesting sites, collectively deciding the optimal locations. Ants can kill and move very large prey by cooperating. Termites can build massive structures, and ants can build bridges or float-like structures over water using their own bodies.
These collective behaviors emerge because of simple rules at the individual level that lead to complex aggregate behavior. A colony of ants will, over time, converge on an optimal route back from a food source because each individual ant leaves a trail of pheromones behind it as it heads back to the nest. More ants will arrive back at the nest sooner via the faster route, leading to a stronger pheromone trail, which will then cause more ants to use that trail. No individual ant “knows” which trail is fastest, but collectively the colony nonetheless converges on the optimal route.
Robot swarms differ from animal swarms in important ways
Like ants, termites, and bees, simple rules governing the behavior of robots can lead to aggregate swarming behavior for cooperative scouting, foraging, flocking, construction, and other tasks. Robot swarms can differ from those found in nature in several interesting and significant ways. Robot swarms can leverage a mix of direct and implicit communication methods, including sending complex signals over long distances. Robot swarms may consist of heterogeneous agents – a mix of different types of robots working together to perform a task. For example, the “swarmanoid” is a heterogeneous swarm of “eye-bots, hand-bots, and foot-bots” that work together to solve problems.
The most important difference between animal and robot swarms is that robot swarms are designed while swarm behavior in nature has evolved. Swarms in nature have no central controller or “common operating picture.” Robot swarms, on the other hand, ultimately operate at the direction of a human being to perform a specific task.
Concepts for military swarming are largely unexplored
Increasingly autonomous robotic systems allow the potential for swarming behavior, with one person controlling a large number of cooperative robotic systems. Just last year, for example, the Office of Naval Research demonstrated a swarm of small boats on the James River, conducting a mock escort of a high-value ship during a strait transit. Meanwhile, researchers at the Naval Postgraduate School are investigating the potential for swarm vs. swarm warfare, building up to a 50-on-50 swarm aerial dogfight.
These developments raise important questions: How does one fight with a swarm? How does one control it? What are its weaknesses and vulnerabilities? Researchers are just beginning to understand the answers to these questions. At a higher level, though, a look at the historical evolution of conflict can help shed light on how we should think about the role that swarming plays in warfare.
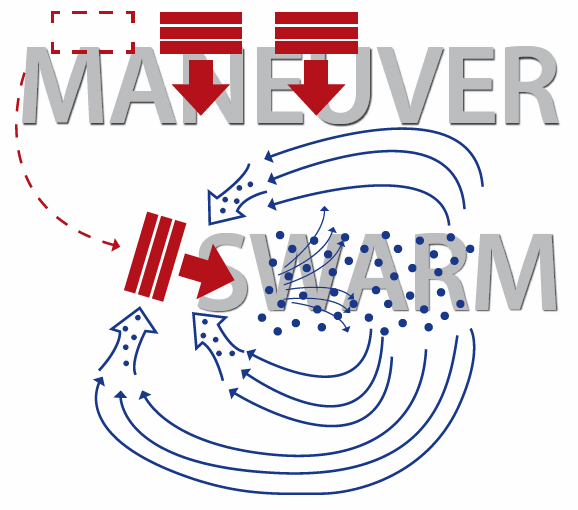
From melee to mass to maneuver to swarm
In 2005, John Arquilla and David Ronfeldt released a groundbreaking monograph, Swarming and the Future of Conflict. It articulates an evolution of four doctrinal forms of conflict across history: melee, mass, maneuver, and swarm.
Ronfeldt and Arquilla proposed that, over time as military organizations incorporated greater communications, training, and organization, they were able to fight in an increasingly sophisticated manner, leveraging more advanced doctrinal forms, with each evolution superior to the previous. Today, they argued, militaries predominantly conduct maneuver warfare. But swarming would be the next evolution.
From melee to mass
In ancient times, warriors fought in melee combat, fighting as uncoordinated individuals (think: Braveheart). The first innovation in doctrine was the invention of massed formations like the Greek Phalanx that allowed large numbers of individuals to fight in organized ranks and files as a coherent whole, supporting one another.
Massed formations have the advantage of synchronizing the actions of combatants, and were a superior innovation in combat. But massing requires greater organization and training, as well as the ability for individuals to communicate with one another in order to act collectively.

In melee fighting, combatants fight as individuals, uncoordinated. Massed formations have the advantage of synchronizing the actions of combatants, allowing them to support one another in combat. Massing requires greater organization, however, as well as the ability for individuals to communicate to one another in order to act as a whole.
From mass to maneuver
The next evolution in combat was maneuver warfare, which combined the benefits of massed elements with the ability for multiple massed elements to maneuver across long distances and mutually support each other. This was a superior innovation to mass on its own because it allowed separate formations to move as independent elements to outflank the enemy and force the enemy into a disadvantageous fighting position. Maneuver warfare requires greater mobility than massing, however, as well as the ability to communicate effectively between separated fighting elements.

Maneuver warfare combines the advantages of mass with increased mobility. In maneuver warfare, mutually supporting separate massed formations move as independent elements to outflank the enemy and force the enemy into a disadvantageous fighting position. Maneuver warfare requires greater mobility than massing as well as the ability to communicate effectively between separated fighting elements.
From maneuver to swarm
Arquilla and Ronfeldt’s hypothesis was that maneuver was not the culmination of combat doctrine, but rather another stage of evolution that would be superseded by swarming. In swarming, large numbers of dispersed individuals or small groups coordinate their actions to fight as a coherent whole.
Swarm warfare, therefore, combines the highly decentralized nature of melee combat with the mobility of maneuver and a high degree of organization and cohesion, allowing a large number of individual elements to fight collectively. Swarming has different organization and communication requirements than maneuver warfare, since the number of simultaneously maneuvering and fighting individual elements is significantly larger.
Swarm warfare combines the highly decentralized nature of melee combat with the mobility of maneuver and a high degree of organization and cohesion, allowing a large number of individual elements to fight collectively. Swarming has much higher organization and communication requirements than maneuver warfare, since the number of simultaneously maneuvering and fighting individual elements is significantly larger.
Challenges to fighting as a swarm
These four types of warfare – melee, mass, maneuver, and swarm – require increasingly sophisticated levels of command-and-control structures and social and information organization. Examples of all four forms, including swarming, can be found dating to antiquity, but widespread use of higher forms of warfare did not occur until social and information innovations, such as written orders, signal flags, or radio communication, enabled coherent massing and maneuver.
Swarming tactics date back to Genghis Khan, but have often played a less-than-central role in military conflict. Recent examples of swarming in conflict can be seen in extremely decentralized organizations like protest movements or riots. In 2011, London rioters were able to communicate, via London’s Blackberry network, the location of police barricades. They were then able to rapidly disperse to avoid the barricades and re-coalesce in new areas to continue looting. The police were significantly challenged in their ability to contain the rioters, since the rioters actually had better real-time information than the police. Moreover, because the rioters were an entirely decentralized organization, they could more rapidly respond to shifting events on the ground. Rioters did not need to seek permission to change their behavior; individuals simply adjusted their actions based on new information they received.
This example points to some of the challenges in swarming. Effectively employing swarming requires a high degree of information flow among disparate elements; otherwise the fighting will rapidly devolve into melee combat. Individual elements must not only be connected with one another and able to pass information, but also able to process it quickly. It also depends upon the ability to treat individual elements as relatively sacrificial, since if they are isolated they may be subject to being overwhelmed by larger, massed elements. Finally, and perhaps most challenging for military organizations, swarming depends on a willingness to devolve a significant amount of control over battlefield execution to the fighting elements closest to the battlefield’s edge. Thus, swarming is in many ways the ultimate in commander’s intent and decentralized execution. The resulting combat advantage is far greater speed of reaction to enemy movements and battlefield events in real-time.
The Operational Advantages of Robot Swarms
The information-processing and communications requirements of swarming, as well as the requirement to treat individual elements as relatively sacrificial, makes swarming a difficult tactic to employ with people. It is ideal, however, for robotic systems. In fact, as militaries deploy large numbers of low-cost robotic systems, controlling each system remotely as is done today would be cost-prohibitive in terms of personnel requirements. It will also slow down the pace of operations. Autonomous, cooperative behavior of multiple robotic systems operating under human command at the mission level will be necessary to control large numbers of robotic systems. Autonomous, cooperative behavior will also unlock many advantages on the battlefield in terms of greater coordination, intelligence and speed. A few examples are given below:
Swarming has tremendous potential on the battlefield for coordinated action, far beyond simply overwhelming an adversary with sheer numbers. However, paradigm shifts in warfare ultimately are derived not just from a new technology, but the combination of technology with new doctrine, organization, and concepts of operation. Concepts for swarming are largely unexplored, but researchers are beginning to conduct experiments to understand how to employ, control and fight with swarms. Because much of the technology behind robotic swarms will come from the commercial sector and will be widely available, there is not a moment to lose. The U.S. military should invest in an aggressive program of experimentation and iterative technology development, linking together developers and warfighters, to harness the power of swarms.
Paul Scharre is a fellow and Director of the 20YY Warfare Initiative at the Center for a New American Security (CNAS) and author of CNAS’ recent report, “Robotics on the Battlefield Part II: The Coming Swarm.” He is a former infantryman in the 75th Ranger Regiment and has served multiple tours in Iraq and Afghanistan.
Image: Adapted from D. Dibenski (public domain) and Reilly Butler (CC)